







")
")
")
")
")
")





")
")
")
")
")
")






51,00 грн
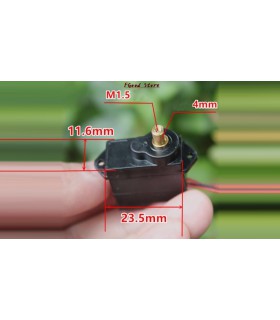
Сервопривод DC 3-6V М10 с металлическим редуктором 360 градусов.


По сути, это мотор-редуктор, способный поворачивать выходной вал строго в заданное положение (на угол) и удерживать его там, вопреки сопротивлениям и возмущениям недружелюбной среды. Нужно это было в первую очередь моделистам, для управления положениями различных закрылков, рулей и вертолётных лопастей. Оттуда, из моделизма, и пришло в остальные сферы технического творчества и в робототехнику в частности.
Управление осуществляется с помощью качалки' - пластикового рычага с отверстиями для закрепления тяг рулей высоты, глубины, элеронов, ног робота и тд.
Встроенным 3-пиновым кабелем (ок. 28 см) сервопривод без проблем подключается к различным контроллеров (Arduino PIC ARM AVR и др.) И отлично управляется с помощью них.
Технические характеристики Тип редуктора: металлический Рабочее напряжение: 4.8-7.2 В Рабочая скорость: Без нагрузки при 4.8 В - 0.17 с / 60 градусов Без нагрузки при 6 В - 0.13 с / 60 градусов Пусковой момент: При 4.8 В - 9 кг * см При 6 В - 12 кг * см Рабочая температура: 0-55 ° C Размер: 4 х 1.9 х 4.3 см Вес: прибл. 57 гPlease sign in first.
Войти")
")
")



")
")
")



")
")


")
")


")
")
")
")



")
")
")
")




")
")
")



")
")



")
")
")



")
")
")



")

")

")
")


")
")


")
")

")
")


")
")
")



")
")
")



")
")

")
")


")
")


")
")


")
")


")
")


")

")

")
")
")



")
")
")



")
")


")
")


&media=https://electricbike.com.ua/16686-large_default/servoprivod-dc-3-6v-m10-s-metallicheskim-reduktorom-360-gradusov-19085.jpg){kind=link}
&media=https://electricbike.com.ua/18445-large_default/drajver-shagovogo-dvigatelya-uln2003an-10325.jpg){kind=link}
&media=https://electricbike.com.ua/16409-large_default/shassi-platforma-umnogo-avtomobilya-na-4-kolesa-arduino-17496.jpg){kind=link}
&media=https://electricbike.com.ua/16979-large_default/servoprivod-servo-servomashinka-dm-s0090d-360-gradusov-15544.jpg){kind=link}
&media=https://electricbike.com.ua/16143-large_default/plata-rasshireniya-l298p-motor-shield-dlya-arduino-17925.jpg){kind=link}
&media=https://electricbike.com.ua/4468-large_default/motor-reduktor-s-kolesom-dlya-proektov-arduino-12075.jpg){kind=link}
&media=https://electricbike.com.ua/16124-large_default/koleso-dlya-modelej-i-roboplatform-arduino-15240.jpg){kind=link}
&media=https://electricbike.com.ua/4126-large_default/servoprivod-servomashinka-serva-tower-pro-sg90-360-gradusov-arduino-15515.jpg){kind=link}
&media=https://electricbike.com.ua/16890-large_default/motor-reduktor-dlya-robota-mashiny-arduino-15152.jpg){kind=link}
&media=https://electricbike.com.ua/15479-large_default/krepleniya-pod-servoprivod-sg90-i-shagovyj-motor-arduino-15419.jpg){kind=link}
&media=https://electricbike.com.ua/18448-large_default/drajver-shagovogo-dvigatelej-l298n-5v-2a-arduino-10586.jpg){kind=link}
&media=https://electricbike.com.ua/16634-large_default/servoprivod-servomashinka-serva-tower-pro-mg90s-360-gradusov-arduino-15516.jpg){kind=link}
&media=https://electricbike.com.ua/18204-large_default/modul-shild-upravleniya-dvigatelyami-l293d-arduino-11124.jpg){kind=link}
&media=https://electricbike.com.ua/17971-large_default/servotester-servoprivod-esc-regulyatorov-s812-10749.jpg){kind=link}
&media=https://electricbike.com.ua/16983-large_default/servoprivod-ts90m-360-gradusov-dlya-arduino-16854.jpg){kind=link}
&media=https://electricbike.com.ua/18057-large_default/servoprivod-servomashinka-tower-pro-sg92r-11205.jpg){kind=link}
Оставьте отзыв